フォトカプラの使い方 [電子回路]
本日 フォトカプラの使い方について実験です。
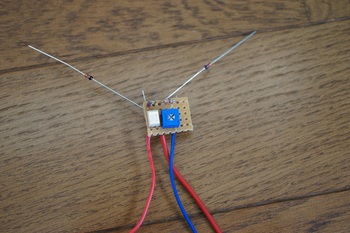
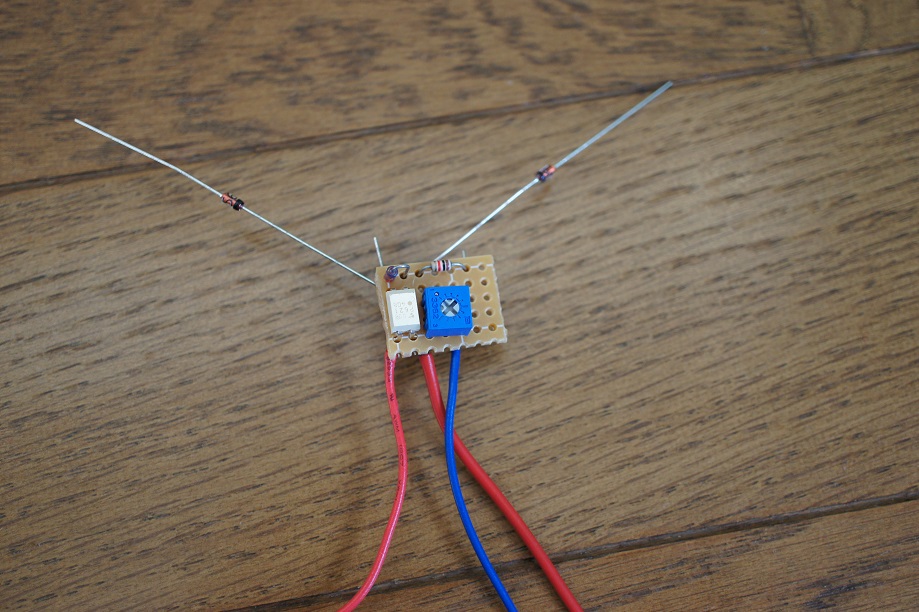
前回の回路に 秋月で購入した 定電流回路CRDを2個直列にした入力で構成しました。
回路はこんな感じで
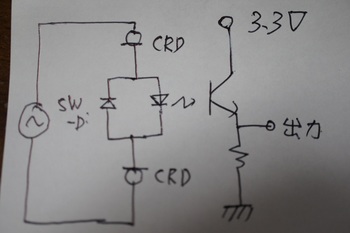
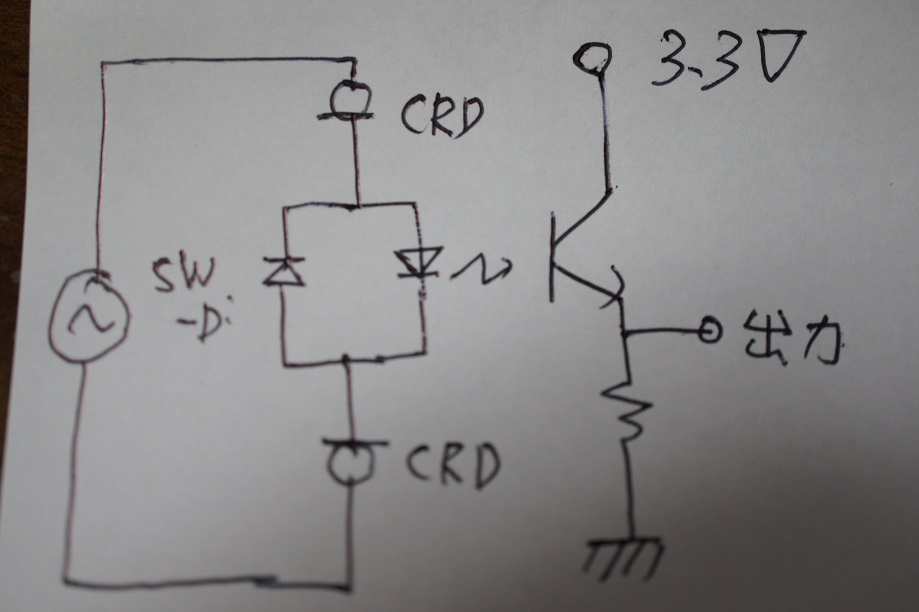
回路図はこうなります。
早速実験をしたところ ほんの少し車輪をうごかしただけで きれいな波形が出てきます。
さすがに とまるほど 車輪が遅くなれば 出力波形は でなくなりますが とりあえず成功です。
ハブダイナモライトに採用してみたいと思います。
前回の回路に 秋月で購入した 定電流回路CRDを2個直列にした入力で構成しました。
回路はこんな感じで
回路図はこうなります。
早速実験をしたところ ほんの少し車輪をうごかしただけで きれいな波形が出てきます。
さすがに とまるほど 車輪が遅くなれば 出力波形は でなくなりますが とりあえず成功です。
ハブダイナモライトに採用してみたいと思います。
フォトカプラの使い方 [電子回路]
Duty調整回路が不安定な原因は ほぼ フォトカプラの使い方で決定だと思っています。
いままでの使い方は 出力側に3KΩの抵抗、入力にも3KΩの抵抗を使って 出力は1mA、入力は
2~6mAくらい流していました。
おそらく これでも動作はしていたと思いますが
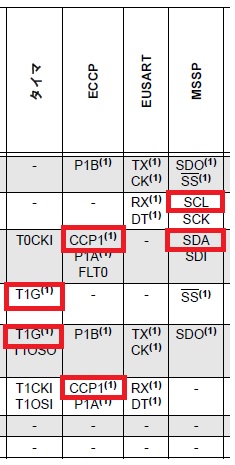
使っているTLP621の特性動作点を特性表に書くと 以下のようになります。
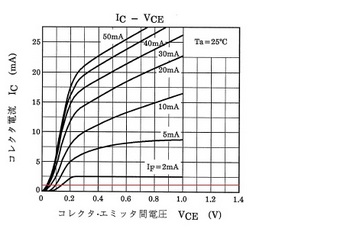
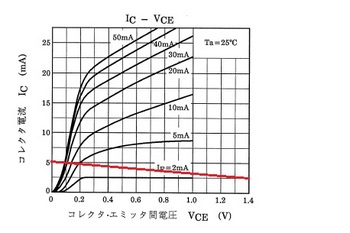
とんでもない 低空飛行ですが 入力側に2mA位入れれば とりえずON/OFFはできそうです。
ただ 使い方としては ちょっとおかしい感じです。
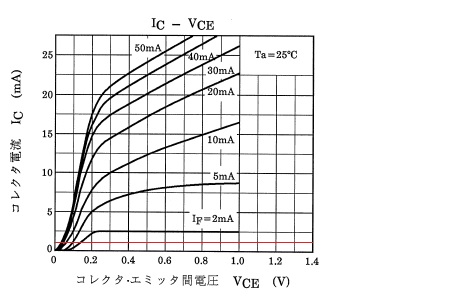
出力側に 3~5mA位流して あげたほうが きれいな動作点をとおります。
但し この場合は 入力電流は 5mA以上必要です。
入力電流が2mAではONしても 1.4V位までしか 電圧が落ちないので 動作しません。
これでは 出力側を1mAくらいにしたほうが きちんとON/OFFするので良いという結果になります。
後者の使い方は まだ試していません。
休み中に回路を組んで 休み明け 試したいと思います。
いままでの使い方は 出力側に3KΩの抵抗、入力にも3KΩの抵抗を使って 出力は1mA、入力は
2~6mAくらい流していました。
おそらく これでも動作はしていたと思いますが
使っているTLP621の特性動作点を特性表に書くと 以下のようになります。
とんでもない 低空飛行ですが 入力側に2mA位入れれば とりえずON/OFFはできそうです。
ただ 使い方としては ちょっとおかしい感じです。
出力側に 3~5mA位流して あげたほうが きれいな動作点をとおります。
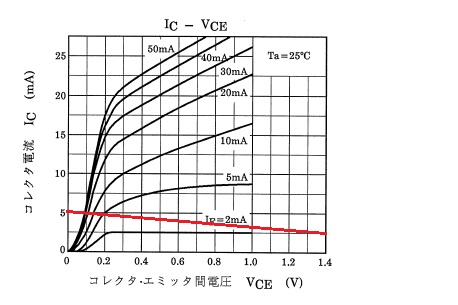
但し この場合は 入力電流は 5mA以上必要です。
入力電流が2mAではONしても 1.4V位までしか 電圧が落ちないので 動作しません。
これでは 出力側を1mAくらいにしたほうが きちんとON/OFFするので良いという結果になります。
後者の使い方は まだ試していません。
休み中に回路を組んで 休み明け 試したいと思います。
DCコンバータ(FET変更 及び ゲート抵抗の影響) [電子回路]
昨日 GWを利用して DCコンバータのFET 及び PIC出力からFETのゲートへの間に
抵抗を入れたらどうなるかの実験をしていました。
結論としては
FETの変更は LED電流にほとんど影響を与えない
但し ゲート容量が大きいものは PICでは駆動しきれない
具体的には
ROHM
①RSR025N03
②RTR025N03
③RTF025N03
ではほとんど区別がつかないくらいです。(あっても1mAくらい?)
但し 以前にも書きましたが
IRLML6334では 波形がなまって 電流も落ちました。
これは 抵抗を入れたときも同じで
100Ωくらいいれると 電流は1~10mAくらい減るかなという感じで 誤差の範囲です。
だいぶ DCコンは煮詰まってきました。
つぎのステップは 光学系へいくしかないのでしょうか?
抵抗を入れたらどうなるかの実験をしていました。
結論としては
FETの変更は LED電流にほとんど影響を与えない
但し ゲート容量が大きいものは PICでは駆動しきれない
具体的には
ROHM
①RSR025N03
②RTR025N03
③RTF025N03
ではほとんど区別がつかないくらいです。(あっても1mAくらい?)
但し 以前にも書きましたが
IRLML6334では 波形がなまって 電流も落ちました。
これは 抵抗を入れたときも同じで
100Ωくらいいれると 電流は1~10mAくらい減るかなという感じで 誤差の範囲です。
だいぶ DCコンは煮詰まってきました。
つぎのステップは 光学系へいくしかないのでしょうか?
もう一つ [電子回路]
12F1822の中で まだ使える機能はないかと考えると ADコンバータがあります。
例えば FETのソースに0.1Ωを取り付けて その電圧をはかれば 電流を測定しているのと等価です。
0.1Ωなら 2Aながれても 0.2Vです。
効率は落ちるのでしょうが 動作観察には 効果的かもしれません。
測定できる項目は
①走行速度
②DUTY
③LED電流
それを LCDへの送信 2PINを加えると
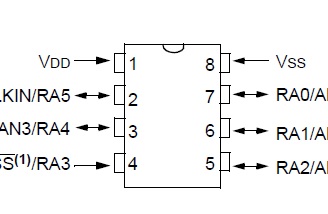
5PINです。
3.3Vの電源と GNDを加えて 7PIN なので あと1PIN余っています。
余っているのは 3か4PINに割り当てられるのですが タイマー1の入力は4PINが適当なので
3PNが余ることになります。
といっても あまり適当な機能もありません。
それどころか 内部CLK 32MHzでは ADコンバータがうまく動かないという情報もあります。
とりあえずは 走行速度と DUTYが 表示できるように プログラムが組めるように勉強したいと思います。
例えば FETのソースに0.1Ωを取り付けて その電圧をはかれば 電流を測定しているのと等価です。
0.1Ωなら 2Aながれても 0.2Vです。
効率は落ちるのでしょうが 動作観察には 効果的かもしれません。
測定できる項目は
①走行速度
②DUTY
③LED電流
それを LCDへの送信 2PINを加えると
5PINです。
3.3Vの電源と GNDを加えて 7PIN なので あと1PIN余っています。
余っているのは 3か4PINに割り当てられるのですが タイマー1の入力は4PINが適当なので
3PNが余ることになります。
といっても あまり適当な機能もありません。
それどころか 内部CLK 32MHzでは ADコンバータがうまく動かないという情報もあります。
とりあえずは 走行速度と DUTYが 表示できるように プログラムが組めるように勉強したいと思います。
また間違い? [電子回路]
ライトのDCコンのプログラムを変更して、LCDへ速度とDutyを表示させることを考えていましたが
ちょっと問題発生。
PICからLCDへの出力は PICの5,6番PIN
DCコンとしての タイマー1入力は 3もしくは4番PINが選択可能
(現状では 4番PIN選択)
DCコン出力は 2もしくは 5番PINが選択可能
(現状では 4番PINから離す目的で 5番PINを選択)
LCDを5,6番
DCコン入力を 4番 出力を2番
にすれば PIN的には 競合はないのですが DCコンの入力と出力が近づきます。
いままで誤動作が発生する原因を助長させるようで ちょっと怖い気がします。
LCDへは 最低でも4本の配線は必要。
内部CLKは32MHzでも大丈夫なようなので これは修正できそうです。
かなりの困難は待ち受けていそうです。
ちょっと休憩 [電子回路]
今週末は ライトの作成関係はちょっと休憩とします。
私は 通勤車には速度計を付けていないので 今何Km/hで走っているか わかりません。
健康のためなので あくせく走るのはまっぴらごめんです。
でも今回のように 速度でDutyを変えるように設計すると なんか確認したくなります。
いつも測定につかっている CATEYEのサイコンでもOKなのですが どうせならPICから
速度とDutyを出力させて 観察するのはどうだろうかと考えました。
あと いつもの測定でも サイコンへイチイチ目をそらせて 確認するのが おっくうになったので
そこらへんもきっかけの一つです。
そこで 秋月のI2CインターっフェースLCDを使って ちょっと実験です。
先ずは 字を出力するところからですが
そこはネットの力 いくらでも先人の知恵(プログラム?)が転がっております。
あっさり 写真のような 文字出力は成功です。

これと ライト用DCコンバータ回路を組み合わせればいいだけですね。
結局は Dutyも速度も ハブダイナモの発振周波数から計算するだけなので 根は簡単です。
とは言え そんなには 簡単でできないでしょうが・・・・?
私は 通勤車には速度計を付けていないので 今何Km/hで走っているか わかりません。
健康のためなので あくせく走るのはまっぴらごめんです。
でも今回のように 速度でDutyを変えるように設計すると なんか確認したくなります。
いつも測定につかっている CATEYEのサイコンでもOKなのですが どうせならPICから
速度とDutyを出力させて 観察するのはどうだろうかと考えました。
あと いつもの測定でも サイコンへイチイチ目をそらせて 確認するのが おっくうになったので
そこらへんもきっかけの一つです。
そこで 秋月のI2CインターっフェースLCDを使って ちょっと実験です。
先ずは 字を出力するところからですが
そこはネットの力 いくらでも先人の知恵(プログラム?)が転がっております。
あっさり 写真のような 文字出力は成功です。

これと ライト用DCコンバータ回路を組み合わせればいいだけですね。
結局は Dutyも速度も ハブダイナモの発振周波数から計算するだけなので 根は簡単です。
とは言え そんなには 簡単でできないでしょうが・・・・?
HL-EL540の改造で問題 [電子回路]
とりあえず ULTRAFIRE C8の改造は終わったので HL-EL540の改造もしようかなと思って
考え始めました。
ところが 使っているLEDはNSSW219Bなので 1.5Aが最大電流です。
いまの回路は 下手すると 2Aまで出力できます。
1.5Aに制限しながら 実際につかう 25Km/h以下の電流を増加させる制御はないかと
模索しなければ なりません。
DUTYだけでは面白くないので 周波数は変えられないかも考えたいです。
考え始めました。
ところが 使っているLEDはNSSW219Bなので 1.5Aが最大電流です。
いまの回路は 下手すると 2Aまで出力できます。
1.5Aに制限しながら 実際につかう 25Km/h以下の電流を増加させる制御はないかと
模索しなければ なりません。
DUTYだけでは面白くないので 周波数は変えられないかも考えたいです。
PIC発振回路での コイル比較 [電子回路]
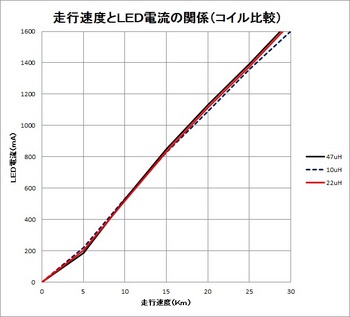
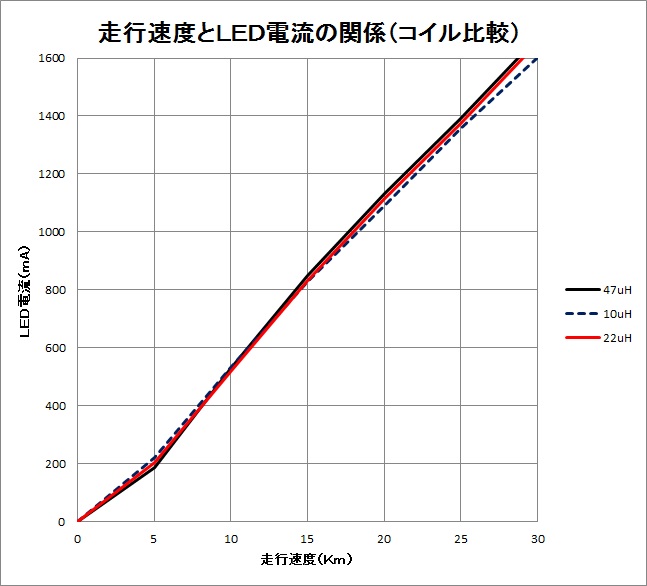
PICの発振周波数 100KHz DUTY可変回路で コイル変更して 再確認しました。
結果は 変わらず
ほとんど 測定誤差範囲でしょう。
もし無理やり差分をしようと思うなら 低速は 10uH、高速は47uHが良いというかんじでしょうか?
いずれにせよ この程度なら どれをつかってもOKでしょう。
結果は 変わらず
ほとんど 測定誤差範囲でしょう。
もし無理やり差分をしようと思うなら 低速は 10uH、高速は47uHが良いというかんじでしょうか?
いずれにせよ この程度なら どれをつかってもOKでしょう。
回路パターン変更 [電子回路]
回路パターンを変更しました。
出力側の回路(コイル 及び ダイオード)をPICの入力近辺から離す変更は効果が多少で
完璧きではありませんでした。
そこで 3端子レギュレータ および PIC電源 および フォトカプラの出力(抵抗及びPICへの配線)
の空中配線関係の見直しをしたところ 問題なく動き始めました。
回路の写真としてはこんな感じです。

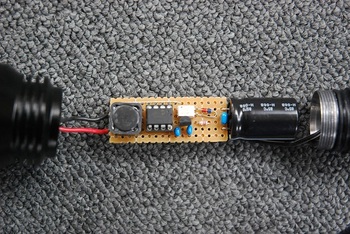
いろいろ空中配線が必要ですが とりあえずライトの中に納まるようにはなりました。
ただ 動かしている時も感じた 低速側の 0~8Km/hでのDUTY70%はやりすぎのようで やはり
バタつきが大きい感じです。
実際には ここもほとんど使われない領域なのですが 実走行ではどうでしょう。
とりあえず 58%くらいにDUTYを落としてみましたが あまり印象は変わりませんでした。
部屋の中 5m先の壁への照射では
①CATEYE HL-EL625RC
②ULTRAFIRE WF-501B

よりは確実にあかるくなっているように思います。
ただ やはり25Km/hで回し続けていると かなりライトが熱くなってきます。
ここら辺は 信頼性になるので 実走行で試してみたいと思います。
出力側の回路(コイル 及び ダイオード)をPICの入力近辺から離す変更は効果が多少で
完璧きではありませんでした。
そこで 3端子レギュレータ および PIC電源 および フォトカプラの出力(抵抗及びPICへの配線)
の空中配線関係の見直しをしたところ 問題なく動き始めました。
回路の写真としてはこんな感じです。

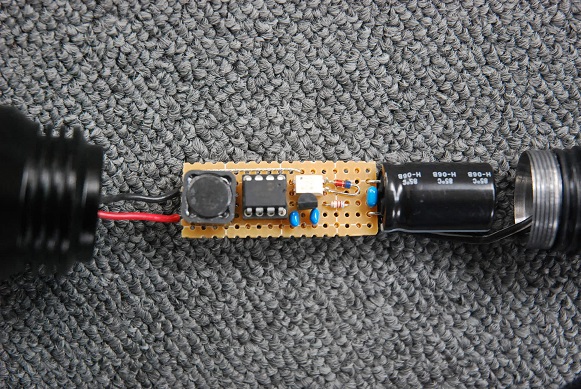
いろいろ空中配線が必要ですが とりあえずライトの中に納まるようにはなりました。
ただ 動かしている時も感じた 低速側の 0~8Km/hでのDUTY70%はやりすぎのようで やはり
バタつきが大きい感じです。
実際には ここもほとんど使われない領域なのですが 実走行ではどうでしょう。
とりあえず 58%くらいにDUTYを落としてみましたが あまり印象は変わりませんでした。
部屋の中 5m先の壁への照射では
①CATEYE HL-EL625RC
②ULTRAFIRE WF-501B

よりは確実にあかるくなっているように思います。
ただ やはり25Km/hで回し続けていると かなりライトが熱くなってきます。
ここら辺は 信頼性になるので 実走行で試してみたいと思います。
ライト用基板完成 しかし [電子回路]
ライト用の基板は完成しました。
しかし また試運転途中で動作がおかしくなってしまいました。
やはり フォトカプラの出力/PICの入力近辺のパターンがおかしいのだと思います。
もしくはシールド線を使う必要があるかもしれません。
ちょっとレベルが高くなるといろいろ問題がおおきくなります。
しかし また試運転途中で動作がおかしくなってしまいました。
やはり フォトカプラの出力/PICの入力近辺のパターンがおかしいのだと思います。
もしくはシールド線を使う必要があるかもしれません。
ちょっとレベルが高くなるといろいろ問題がおおきくなります。



